Problem Statement
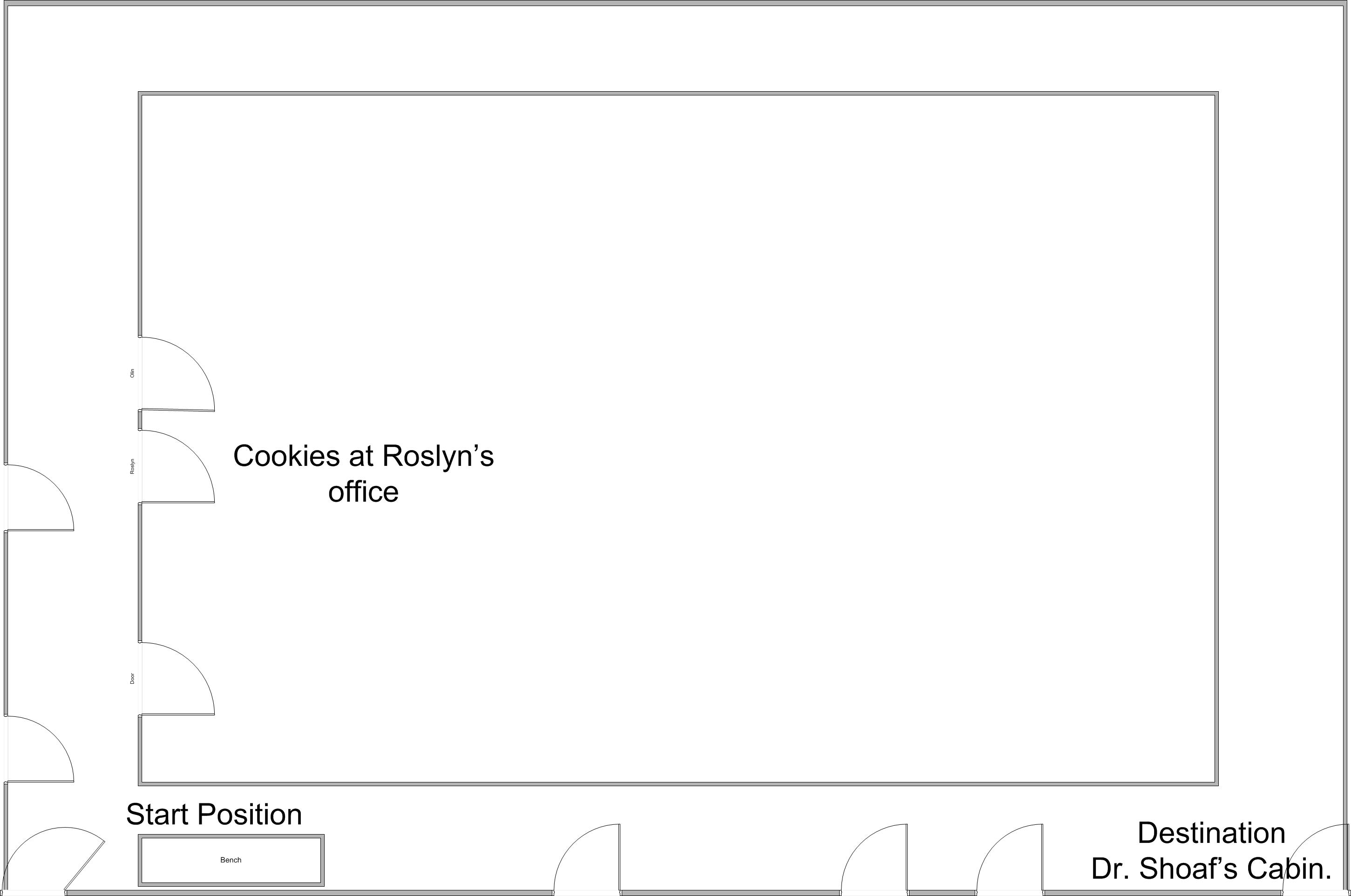
The problem presented was to configure the iRobot Create series Robot to traverse the corridor of the Computer Science Department in the Florida Institute of Technology - Starting from under the bench outside Dr Kaners Cabin till Roslyns Office to collect the cookies. Then go back in the reverse order and to carry the said cookies to Dr Shoaff’s Office.
Additional Objectives
To achieve the goal with the shortest time
To Race with the other robots from fellow students and compensate for their activity
To compensate for a single external interfearence by someone to any bumper sensor at any point